SÉQUENCE : Comment soigner un patient à distance ?
samedi 4 juillet 2020, par
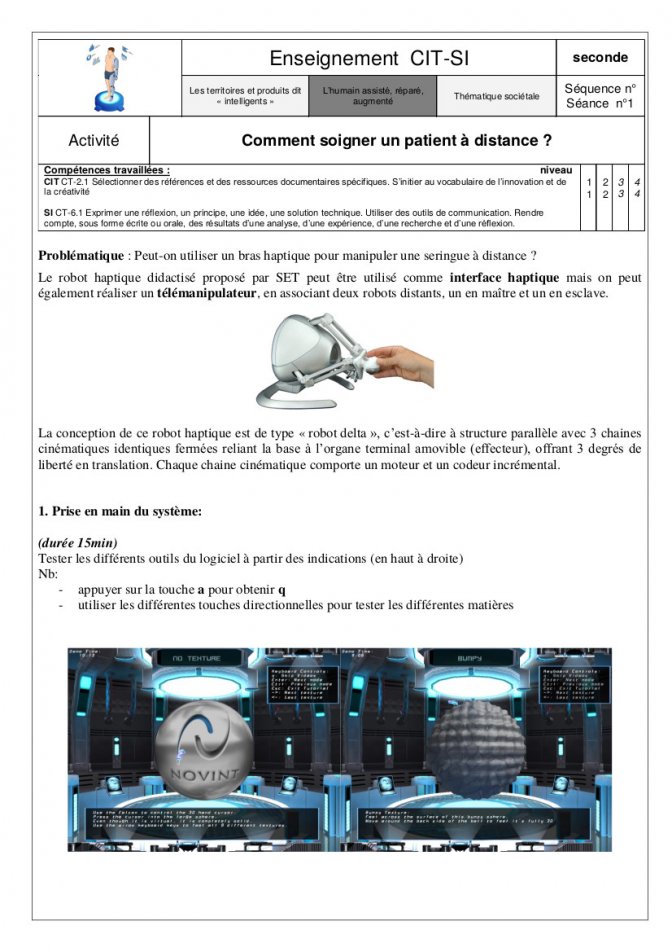
Le robot Haptique didactisé proposé par SET peut être utilisé comme interface haptique mais on peut
également réaliser un télémanipulateur, en associant deux robots distants, un en maître et un en esclave.

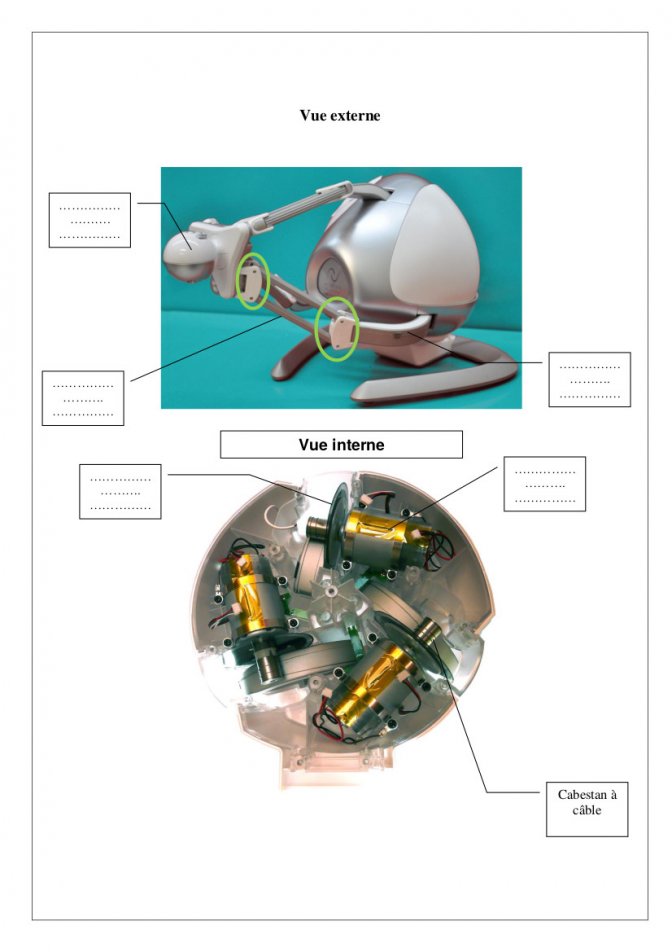
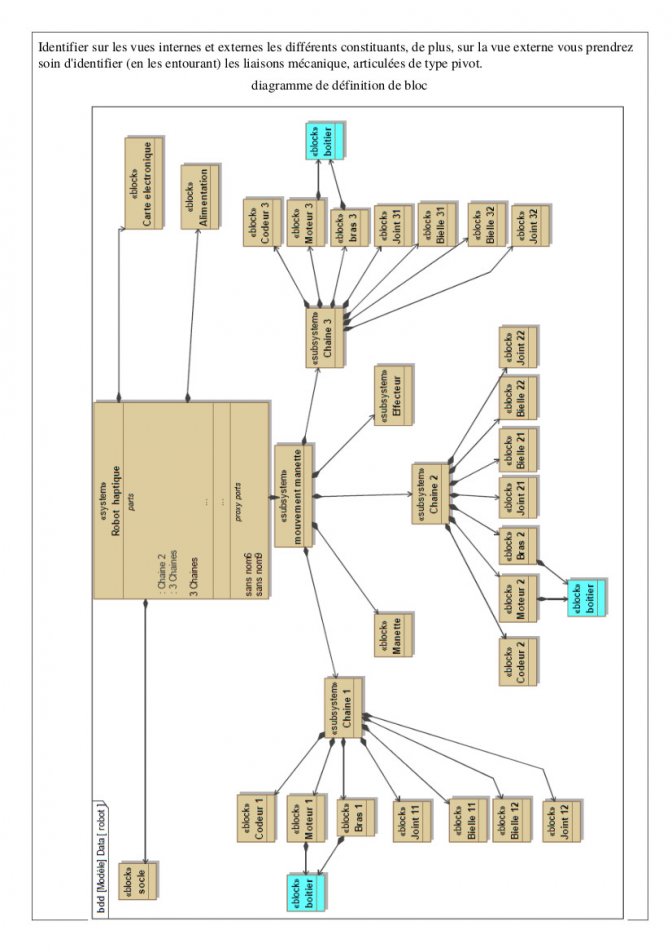
La conception de ce robot haptique est de type « robot delta », c’est-à-dire à structure parallèle avec 3 chaines cinématiques identiques fermées reliant la base à l’organe terminal amovible (effecteur), offrant 3 degrés de liberté en translation. Chaque chaine cinématique comporte un moteur et un codeur incrémental.
La séquence complète est téléchargeable ici :

Aperçu de la séance 1 :